Ռոբոտացված հղկող մեքենա – Բարձր ճշգրտությամբ ավտոմատացված մակերեսային մշակում





Մանրամասն դիագրամ
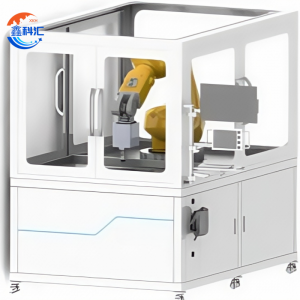

Ռոբոտացված հղկող մեքենայի ակնարկ
Ռոբոտացված հղկող մեքենան առաջադեմ, լիովին ավտոմատացված մակերեսային մշակման համակարգ է, որը նախագծված է ճշգրիտ արտադրության ամենաբարձր պահանջները բավարարելու համար: Այն համատեղում է վեց առանցքային ռոբոտացված կառավարումը, ուժային հետադարձ կապի հղկող տեխնոլոգիան և կրկնակի գլխիկի կոնֆիգուրացիան՝ բացառիկ ճշգրտությամբ և հետևողականությամբ մշակելու լայն տեսականի նյութեր և բարդ երկրաչափություններ:
Անկախ նրանից՝ օպտիկական ոսպնյակների, ավիատիեզերական մասերի, ճշգրիտ ճարտարագիտության բաղադրիչների, թե կիսահաղորդչային կիրառությունների համար է, այս մեքենան ապահովում է կայուն, կրկնվող և բարձրորակ մակերեսային մշակում՝ նույնիսկ նանոմետրական մակարդակի հանդուրժողականությունների դեպքում։


Ռոբոտացված հղկող մեքենայի համապարփակ աշխատանքային մասի համատեղելիություն
Համակարգը աջակցում է հետևյալի մշակմանը.
-
Հարթ մակերեսներապակու, կերամիկայի և մետաղական թիթեղների համար
-
Գլանաձև և կոնաձև ձևերինչպիսիք են գլանները, լիսեռները և խողովակները
-
Գնդաձև և ասֆերային բաղադրիչներօպտիկական համակարգերի համար
-
Ազատ ձևի և առանցքային մակերեսներբարդ կորերով և անցումներով
Դրա բազմակողմանիությունը այն հարմար է դարձնումինչպես զանգվածային արտադրություն, այնպես էլ բարձր ճշգրտությամբ պատվերով արտադրություն.
Ռոբոտացված հղկող մեքենայի հիմնական առանձնահատկությունները և առավելությունները
1. Երկակի հղկման գլխիկի տեխնոլոգիա
-
Հագեցած էմեկ պտույտևինքնառոտացիափայլեցնող գլխիկներ՝ ճկունության համար։
-
Գործիքների արագ փոփոխման հնարավորությունը աջակցում է մշակման բազմաթիվ ռեժիմների՝ առանց երկարատև դադարների։
-
Իդեալական է կոպիտ և նուրբ հղկման փուլերի միջև անցնելու համար։
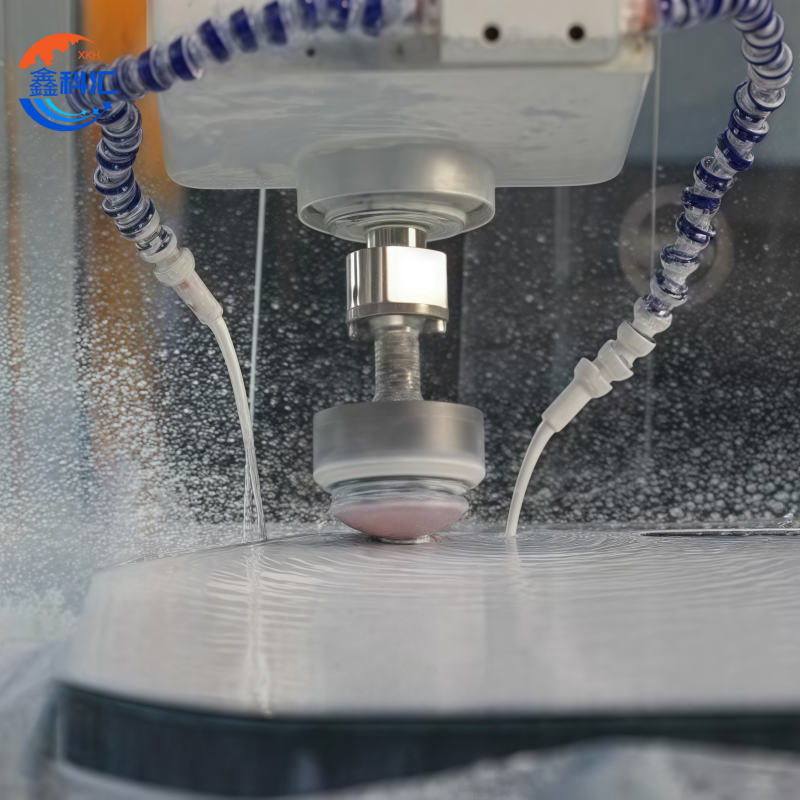
2. Ճշգրիտ ուժի կառավարման համակարգ
-
Իրական ժամանակի մոնիթորինգճնշումը, ջերմաստիճանը և հղկող հեղուկի հոսքը.
-
Ուժի հետևողական կիրառումը ապահովում է աշխատանքային մասի վրա միատարր մակերեսային մշակում։
-
Մակերեսային անհարթություններին ավտոմատ կերպով հարմարվելու ունակություն։
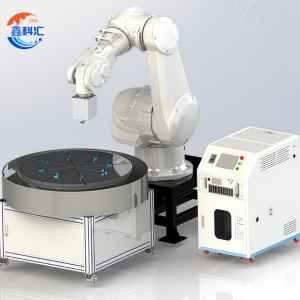
3. Վեց առանցքային ռոբոտային կառավարում
-
Շարժման լիակատար ազատություն՝ բարդ երկրաչափական ձևերը կառավարելու համար։
-
Հարթ, ճշգրիտ շարժման ուղիներ, որոնք հաշվարկվում են առաջադեմ ալգորիթմների միջոցով:
-
Բարձր կրկնվող դիրքորոշման ճշգրտություն՝ ±0.04 մմ-ից մինչև ±0.1 մմ՝ կախված մոդելից։
4. Խելացի ավտոմատացում և չափում
-
Ավտոմատ կարգաբերման գործիքներ՝ ճշգրիտ կարգավորման և հավասարեցման համար։
-
Կոորդինատների չափման համակարգ՝ ճշգրիտ դիրքորոշման համար։
-
Ըստ ցանկությանառցանց հաստության մոնիթորինգիրական ժամանակում որակի վերահսկման համար։
5. Արդյունաբերական մակարդակի կառուցման որակ
-
Երկակի սերվոշարժիչի դիզայնը մեծացնում է հղկման արդյունավետությունը և կայունությունը։
-
Կոշտ մեխանիկական կառուցվածքը նվազագույնի է հասցնում թրթռումը և ապահովում է երկարատև ամրություն։

Ռոբոտացված հղկող մեքենայի տեխնիկական բնութագրերը
| Սարքավորման մոդել | Ռոբոտի մարմին | Կրկնակի դիրքորոշման ճշգրտություն | Մշակման տրամագծի միջակայքը | Միակողմանի պտտվող փայլեցնող գլխիկ | Բազմակի պտտվող հղկող գլխիկ | Փոքր գործիք | Գլխավոր անիվի տեսակի փայլեցում | Գնդաձև գլխիկի փայլեցում | Արագ փոփոխության ավարտ | Ավտոմատ կարգաբերման գործիք | Կոորդինատների չափման ղեկավար | Առցանց հաստության մոնիթորինգ | Թվային կառավարման հարթակ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Ստաուբլի TX2-90L | ±0.04 մմ / լրիվ դիապազոն | Φ50~Φ500 մմ | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Ստաուբլի TX2-140 | ±0.05 մմ / լրիվ դիապազոն | Φ50~Φ600 մմ | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Ստաուբլի TX2-160 | ±0.05 մմ / լրիվ դիապազոն | Φ80~Φ800 մմ | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Ստաուբլի TX200/L | ±0.06 մմ / լրիվ դիապազոն | Φ100~Φ1000 մմ | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1 մմ / լրիվ դիապազոն | Φ100~Φ1000 մմ | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1 մմ / լրիվ դիապազոն | Φ200~Φ2000 մմ | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1 մմ / լրիվ դիապազոն | Φ200~Φ2000 մմ | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Հաճախակի տրվող հարցեր – Ռոբոտային փայլեցնող մեքենա
1. Ի՞նչ տեսակի աշխատանքային մասեր կարող է մշակել ռոբոտ-հղկող մեքենան։
Մեր ռոբոտ-հղկող մեքենան աջակցում է տարբեր ձևերի և մակերեսների, այդ թվում՝ հարթ, կոր, գնդաձև, ազատ ձևի և բարդ ուրվագծերի: Այն հարմար է օպտիկական բաղադրիչների, ճշգրիտ կաղապարների, մետաղական մակերեսների և այլ բարձր ճշգրտությամբ հղկող աշխատանքների համար:
2. Ի՞նչ տարբերություն կա միակողմանի և բազմակողմանի հղկող գլխիկների միջև։
-
Միակողմանի պտտվող փայլեցնող գլխիկԳործիքը պտտվում է մեկ առանցքի շուրջ, իդեալական է ստանդարտ մակերեսային մշակման և բարձր արագությամբ նյութի հեռացման համար։
-
Բազմակի պտտվող հղկող գլխիկԳործիքը համատեղում է պտույտը ինքնապտույտի (պտտման) հետ, ինչը հնարավորություն է տալիս ավելի միատարր հղկել կոր և անկանոն մակերեսների վրա։
3. Որքա՞ն է մշակման առավելագույն տրամագիծը։
Կախված մոդելից՝
-
Կոմպակտ մոդելները (օրինակ՝ IRP500S) բռնակովΦ50–Φ500 մմ.
-
Մեծածավալ մոդելները (օրինակ՝ IRP2000AD) կարող են աշխատել մինչևΦ2000 մմ.
Մեր մասին
XKH-ը մասնագիտանում է հատուկ օպտիկական ապակու և նոր բյուրեղային նյութերի բարձր տեխնոլոգիական մշակման, արտադրության և վաճառքի մեջ: Մեր արտադրանքը նախատեսված է օպտիկական էլեկտրոնիկայի, սպառողական էլեկտրոնիկայի և ռազմական նպատակների համար: Մենք առաջարկում ենք սափրային օպտիկական բաղադրիչներ, բջջային հեռախոսների ոսպնյակների պատյաններ, կերամիկա, LT, սիլիցիումի կարբիդային SIC, քվարց և կիսահաղորդչային բյուրեղային վաֆլիներ: Որակավորված փորձագիտությամբ և առաջատար սարքավորումներով մենք գերազանցում ենք ոչ ստանդարտ արտադրանքի մշակման ոլորտում՝ նպատակ ունենալով դառնալ առաջատար օպտոէլեկտրոնային նյութերի բարձր տեխնոլոգիական ձեռնարկություն:

Առնչվող ապրանքներ
-

4H-կիսամյակային HPSI 2 դյույմ SiC սուբստրատի վաֆլի Արտադրանք...
-
Պատվերով քառակուսի տուփ տրանսպորտային տուփ քառակուսի պատուհանի համար ...
-

6 դյույմանոց HPSI SiC հիմքով վաֆլի սիլիկոնային կարբիդից ...
-

Սապֆիրային կորունդ թանկարժեք քարի Al2O3 բյուրեղյա վարդի համար ...
-

Ալյումինե մետաղական միաբյուրեղյա հիմքի փայլեցնող...
-

Au պատված վաֆլի, շափյուղային վաֆլի, սիլիցիումային վաֆլի...